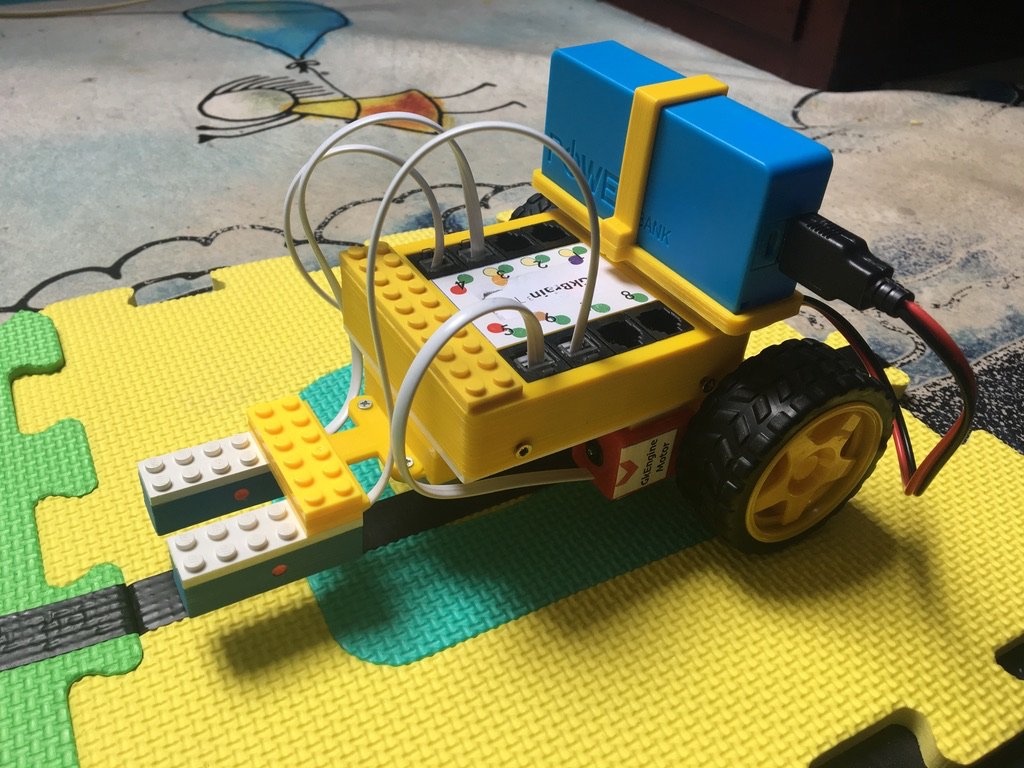
En este reto utilizaremos el GkShade para saber si nuestro robot va por el camino adecuado. El camino lo hacemos con cinta negra (la típica de la ferretería) sobre un fondo claro.
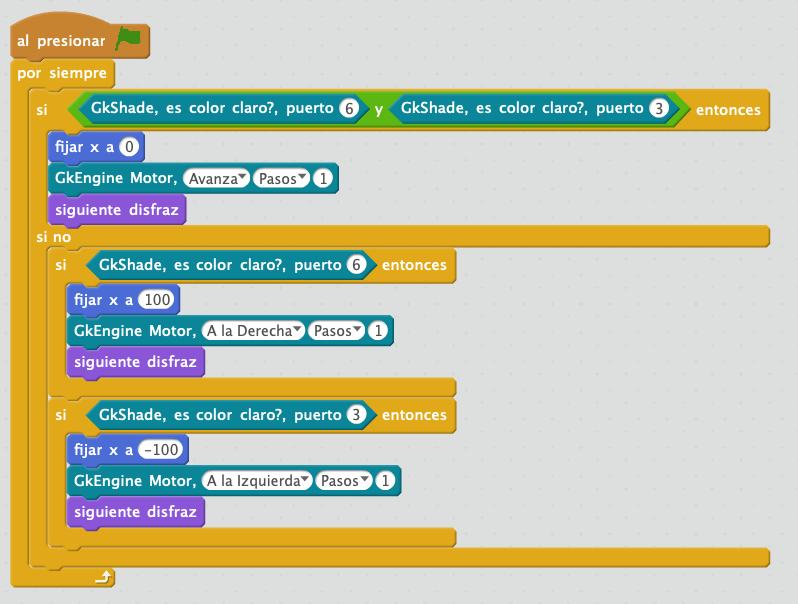
Si la cinta negra está entre los dos sensores, estos reciben el estado «claro» como verdadero. En ese caso avanza, si el sensor de la derecha está encima de la parte oscura, entonces tiene que rectificar hacia la derecha, y si el sensor de la izquierda toca la parte oscura, entonces tiene que rectificar hacia la izquierda. En cada comprobación no puede moverse mucho, sino podría pasarse la línea.
Los bloques azules del movimiento de la x no son necesarios, pero permiten comprobar en pantalla que los sensores funcionan correctamente.